Now that the motors were secured to the frame, I wanted to finally have a go at making one of the motors spin. This meant soldering some bits together to allow me to power a speed controller and for it to send signals to a motor.


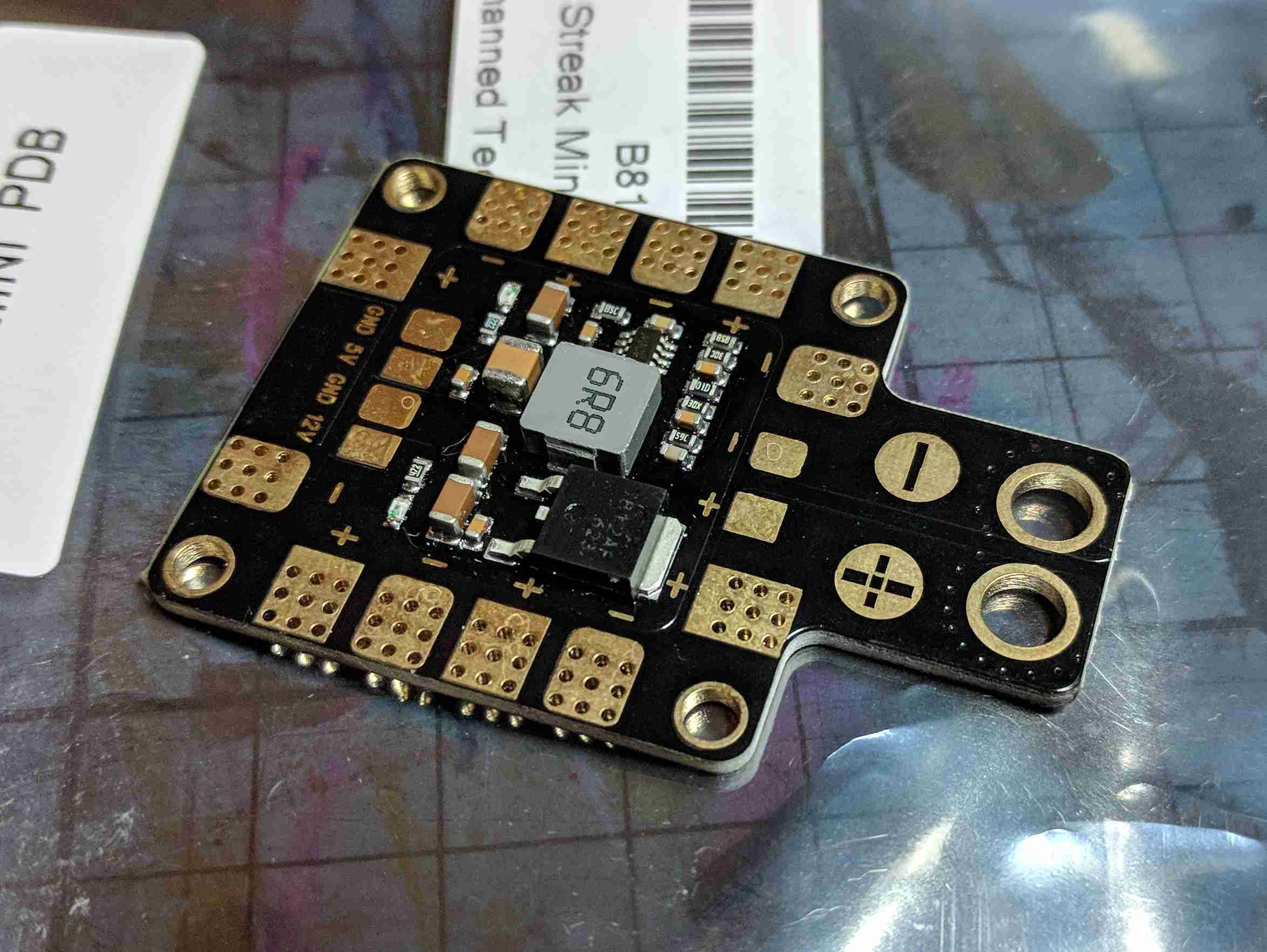

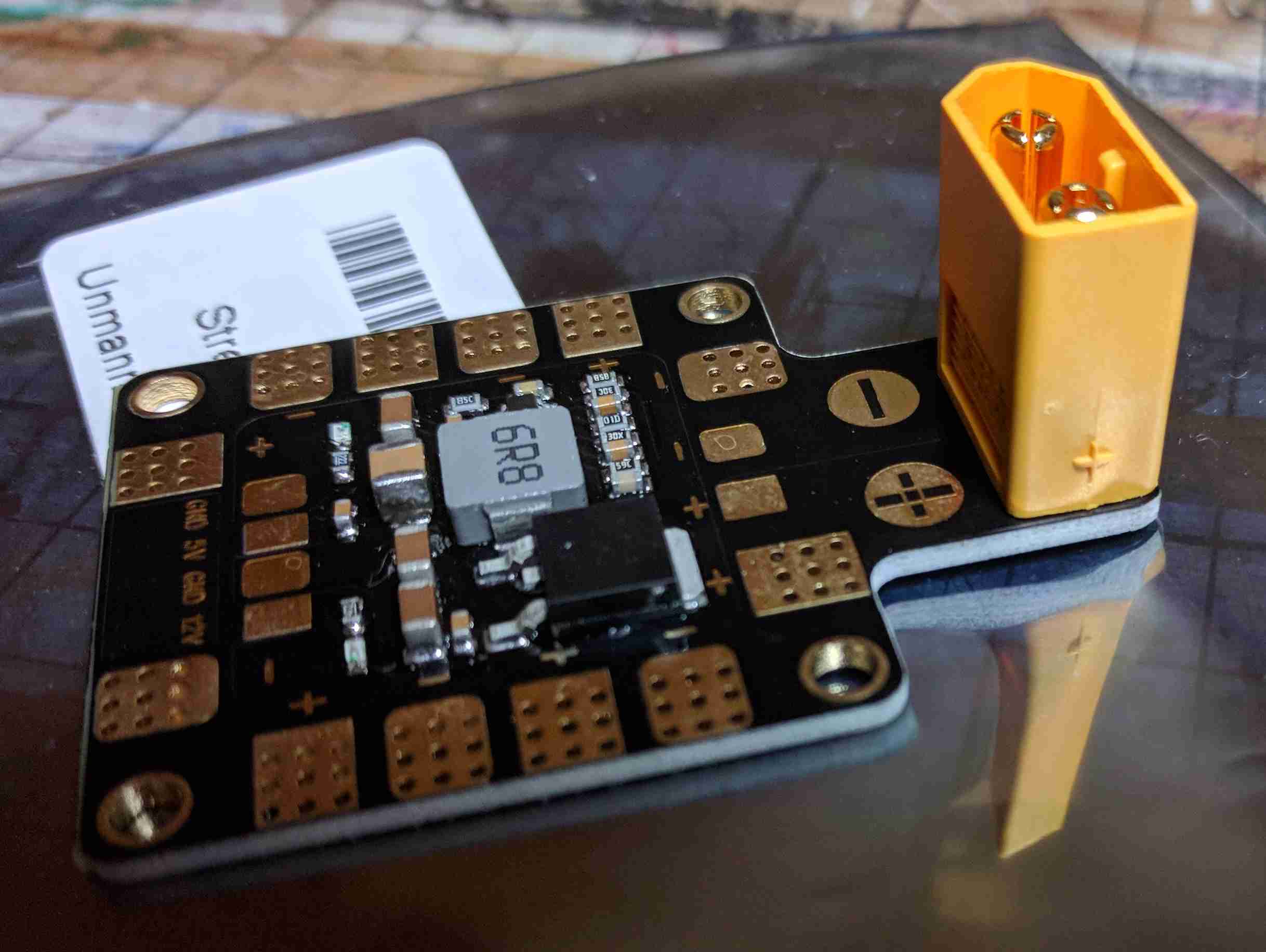
The first step was to solder the battery connector (a standard called XT60) to the Power Distribution Board (PDB). The PDB has two functions: to distribute power from the battery to the four ESCs (by basically providing four sets of pads to solder things to) and to act as a voltage regulator to step down the 14.8V of the battery to 5V with which I can power the Raspberry Pi. The voltage regulator doesn’t seem to be present on all PDBs because it some ESCs contain one and people sometimes use one of them to power their flight controller. For this reason, they’re sometimes called Battery Elimination Circuits (BECs) because it means that you don’t need a separate 5V battery (as far as I can tell).
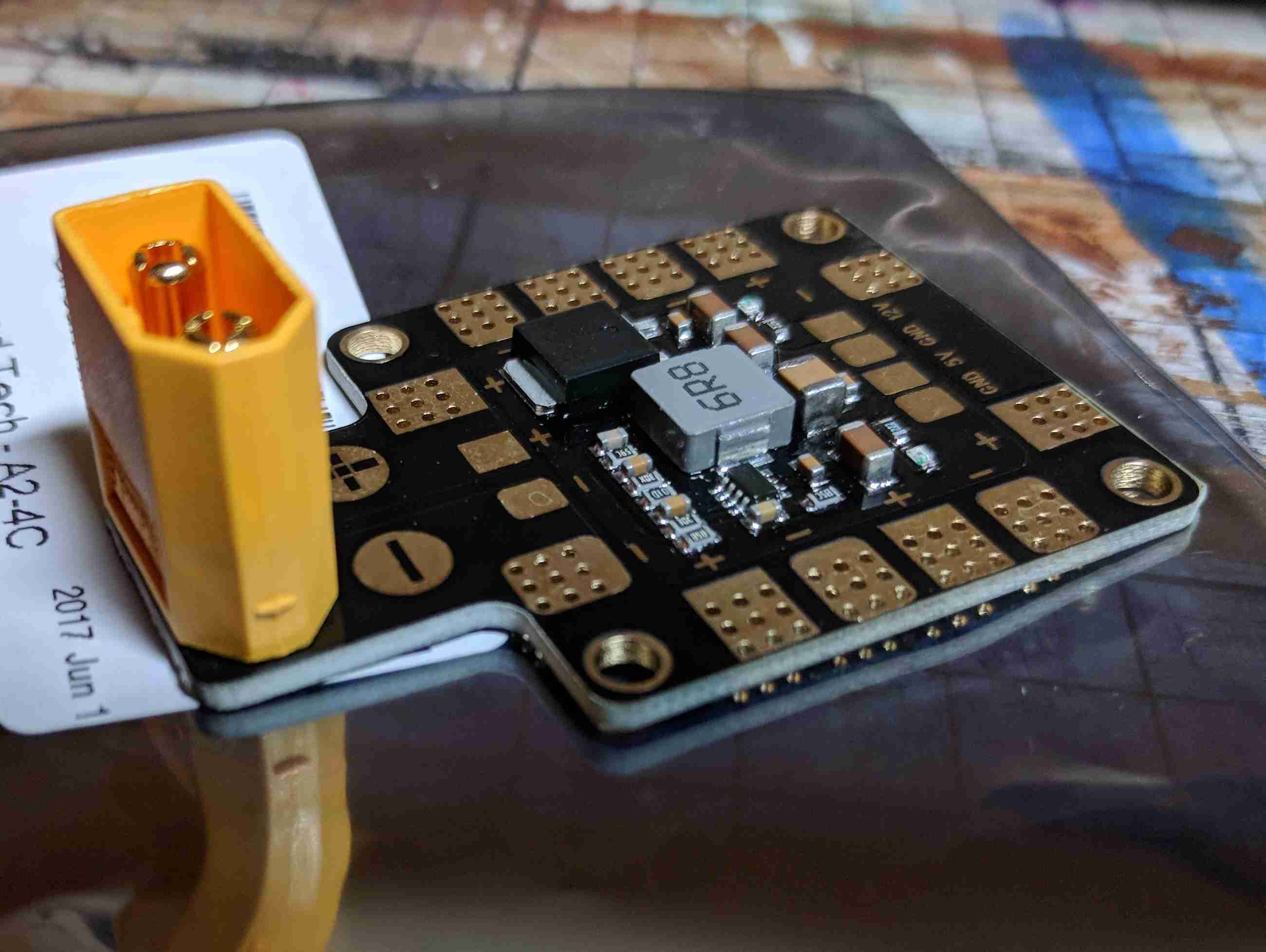

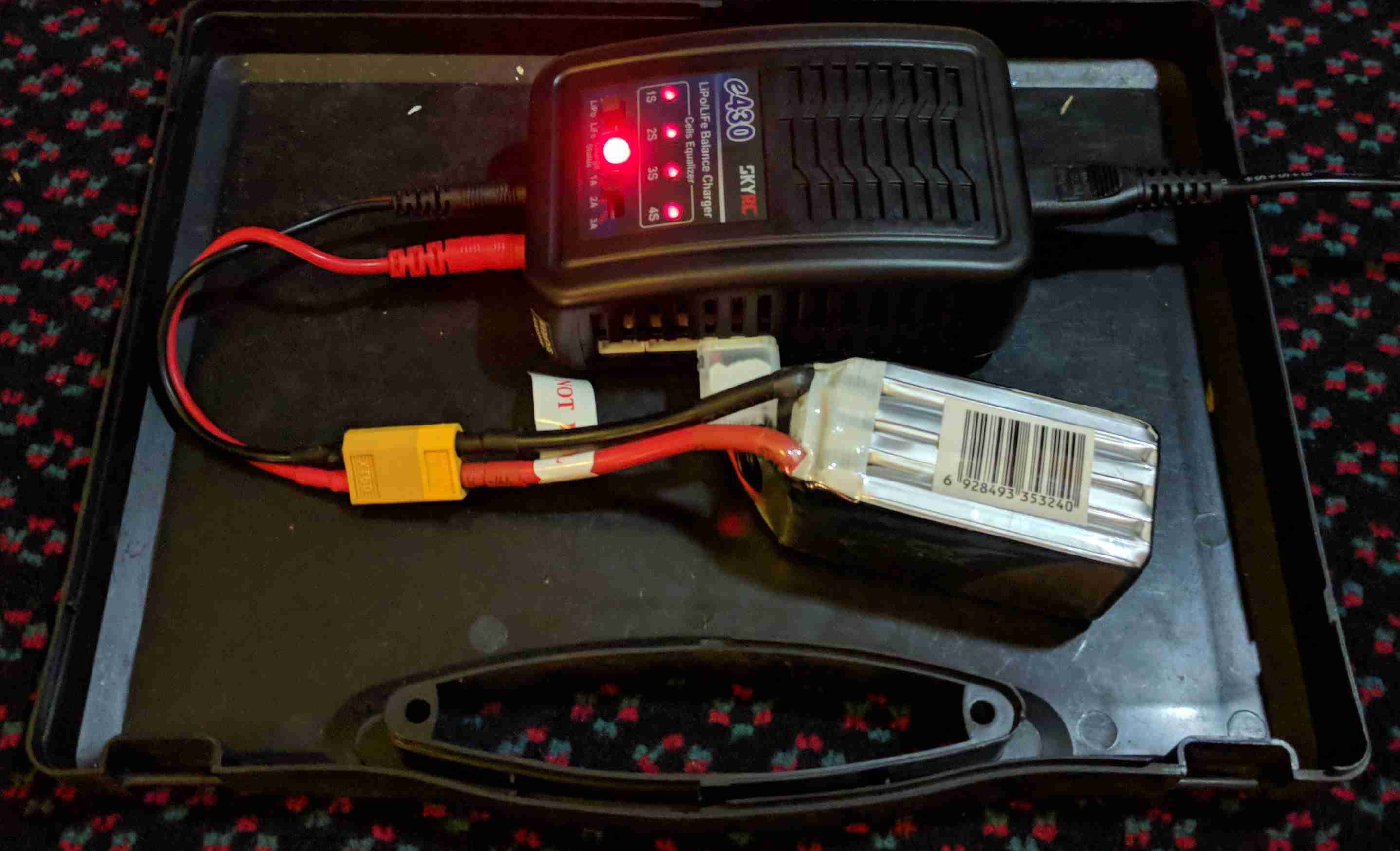
My soldering is not great so I was slightly concerned that I may have shorted the two battery terminals when attaching the connector. I tested this by connecting an LED to a battery and connecting a wire to each terminal as part of the circuit to see if there was a connection. During this test the LED did come on, suggesting that I had connected them together, but looking closely I couldn’t see where this had happened. Though it was risky (in terms of both damaging the battery or even causing it to explode) I decided to connect it anyway and fortunately found that everything was fine and some LEDs on the PDB came on, confirming that all was well.
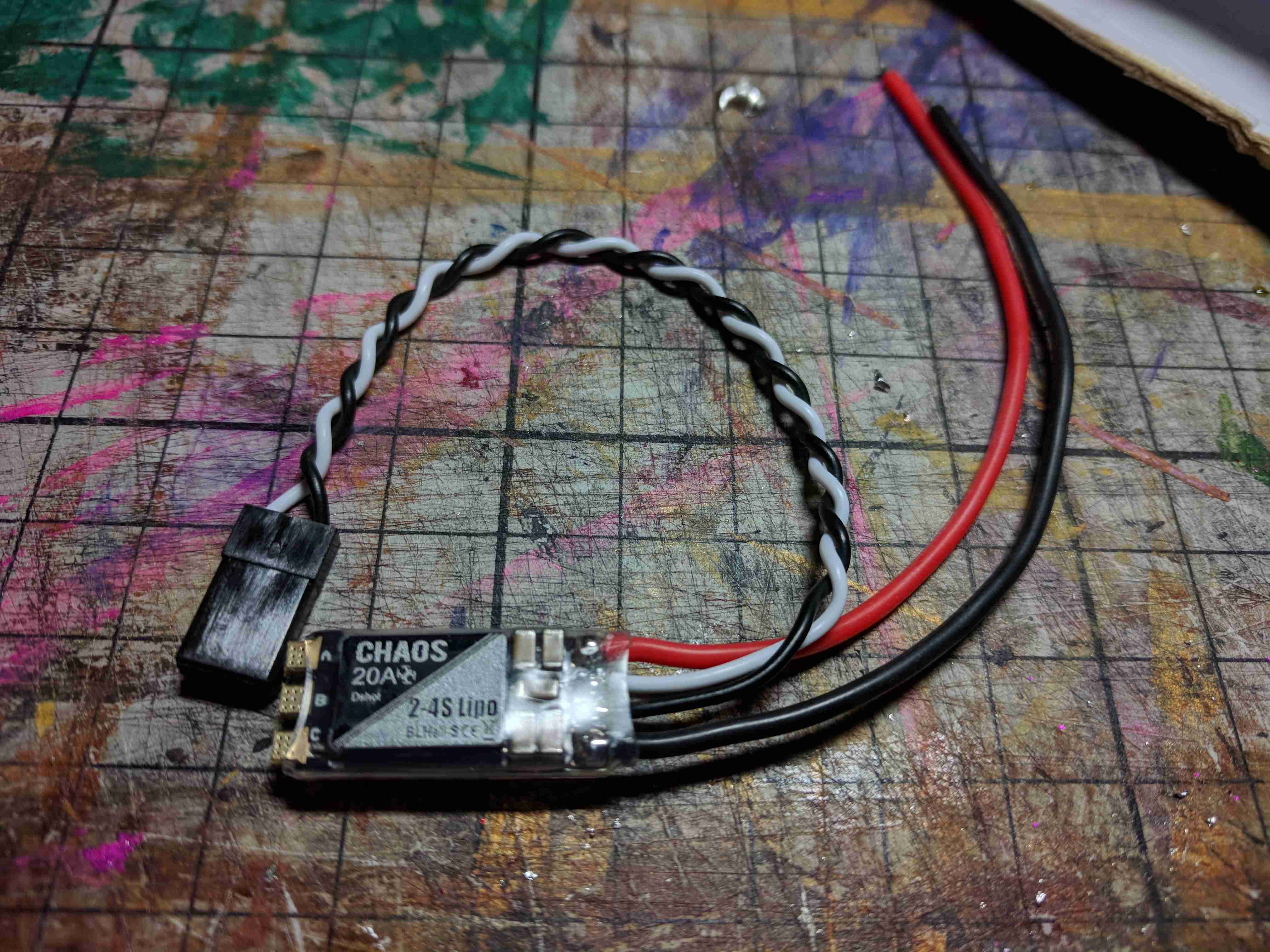
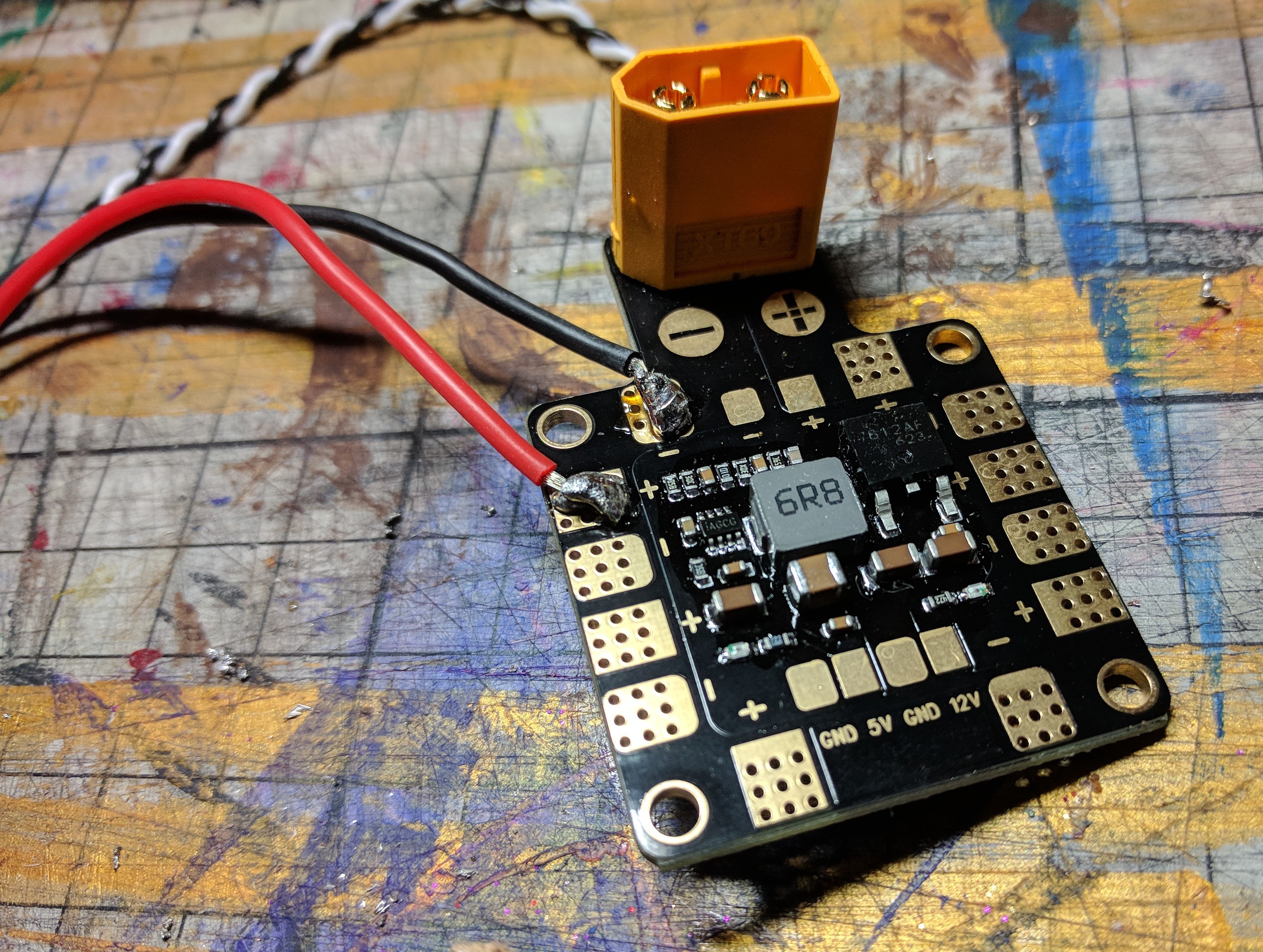
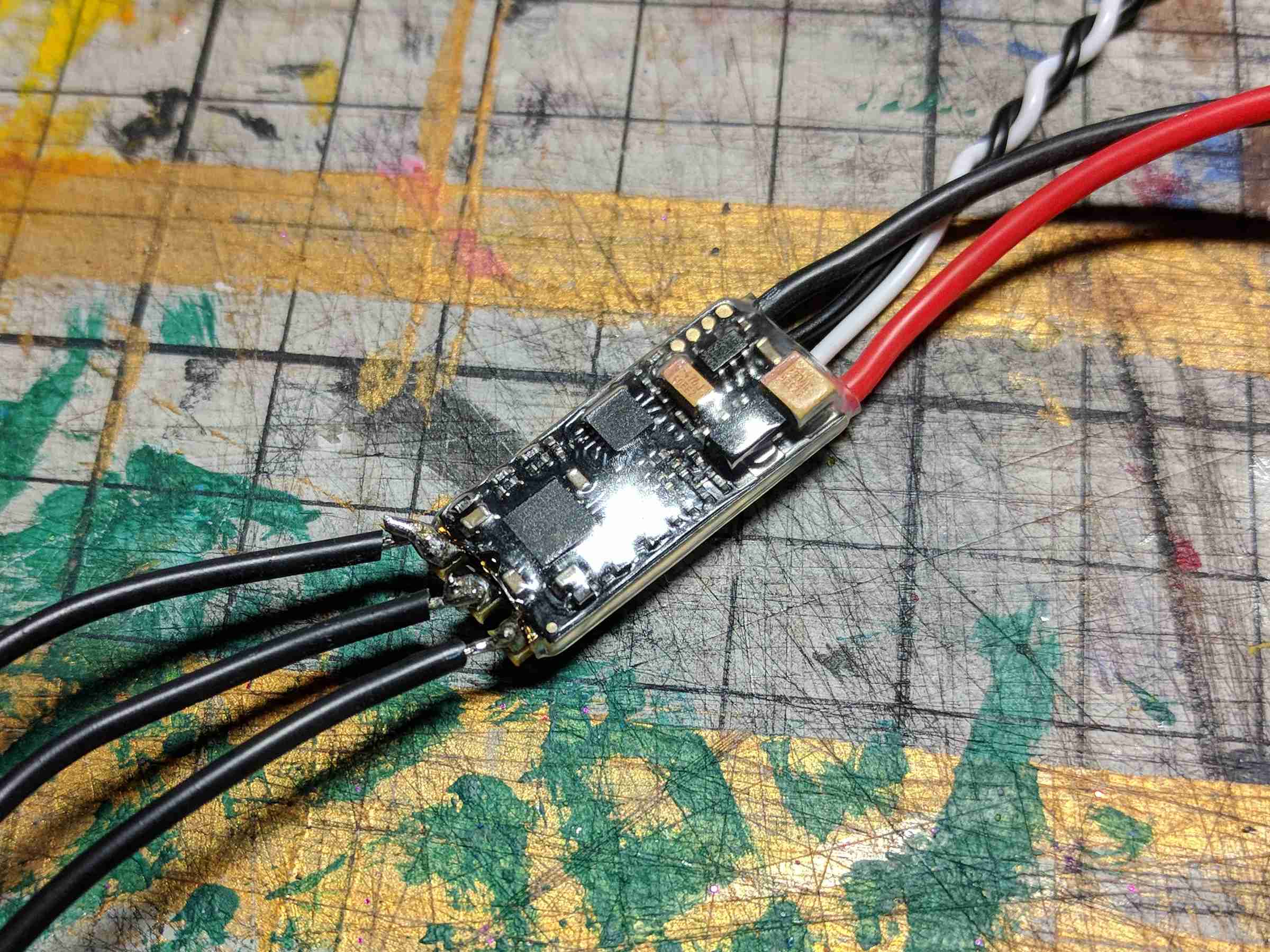
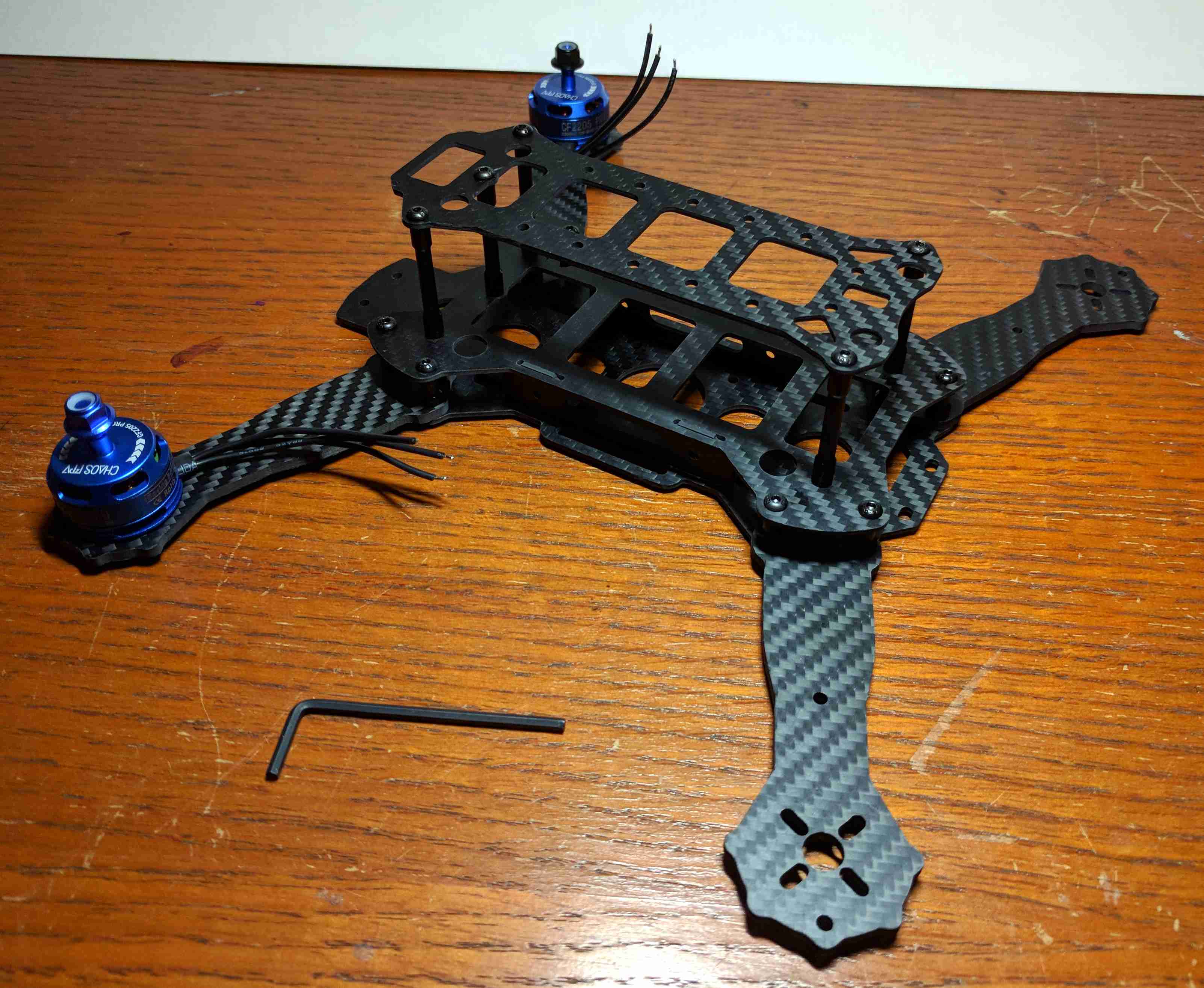
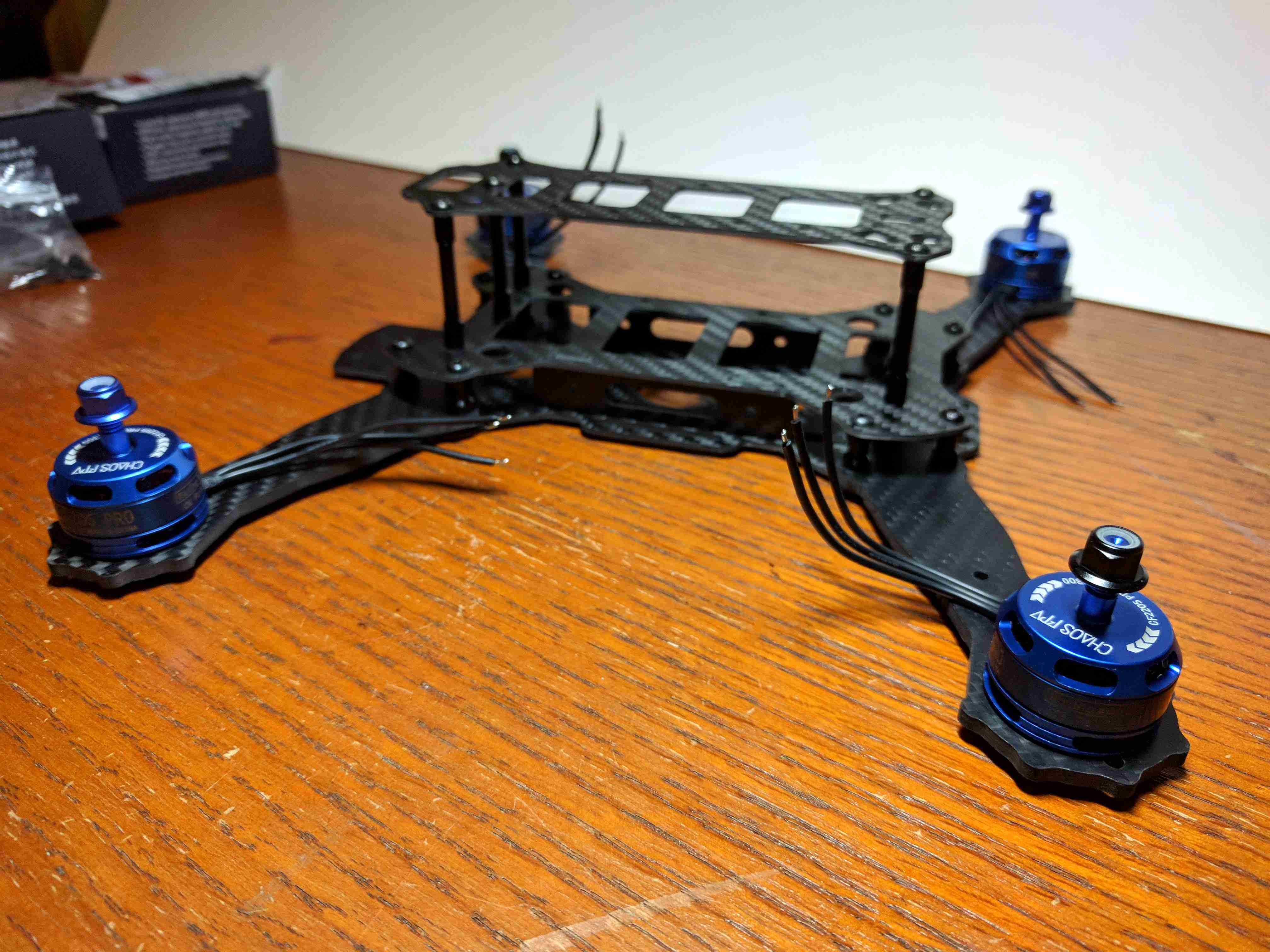
After soldering the connector to the PDB (slightly awkward given that there were just two big holes to cover with solder) I then soldered the red and black wires coming from one of the ESCs to positive and negative pads on the PDB and the three wires coming from one of the motors to the three pads on the ESC. The order of the motors wires shouldn’t matter, but it might turn out that the motor spins the wrong way. If this is the case I will have to un-solder two wires and swap them around.
Plugging the battery in again produced some very exciting beeps. I’ve since learned that the ESCs produce this noise by making the motors vibrate, which seems quite clever.
In theory I now have enough to try making the motor spin.